Servo drives - Apogee & Kepler
High-precision PWM servo drives with linear-grade performance




Achieve unmatched motion control accuracy with our Apogee and Kepler series PWM servo drives, engineered for semiconductor, metrology, and advanced manufacturing applications.
The Apogee & Kepler series deliver linear-level current quality using a filtered 200 kHz PWM architecture, ensuring ultra-low noise and minimal ripple for constant velocity and nanometer-class positioning. Apogee offers up to 24-bit current sensing with custom fluxgate sensors for the highest precision, while Kepler offers 18-bit current sensing with dual-axis capabilities.
EtherCAT connectivity, dual-loop feedback, and broad encoder support enable seamless integration into synchronized systems. Paired with the Prodrive Motion Platform (PMP), these drives provide rapid commissioning, advanced diagnostics, and MATLAB-Simulink compatibility for ultimate results.
-
Linear‑level output with PWM efficiency
Precision of legacy linear amplifiers with higher efficiency.
-
Extreme current‑loop fidelity
800 kHz control bandwidth, delivers ultra‑fast response and exceptional linearity
-
Dual-axis functionality
saves space & complexity while reducing communication delay
-
<1nm stand still jitter
Known for the most precise servo drive in the market

Features
- Filtered 200 kHz PWM switching for linear-grade current quality
- Extreme current-loop fidelity with 800 kHz control bandwidth
- Dual-loop feedback for linear encoder and interferometer
- EtherCAT SubDevice operation with CoE compliance
- Wide encoder compatibility: incremental, analog, and absolute protocols
- Integrated output and EMI filtering for minimal external components
- High-resolution current sensing (up to 24-bit on Apogee)
- Dedicated high-speed Ethernet diagnostics for real-time tuning
- MATLAB-Simulink integration via Prodrive's PMP controllers
- Compact design with advanced thermal management
- Compliance with IEC/UL 61800-5-1 and EMC standards
Benefits
-
Extreme precision
Delivers linear-grade current quality with 200 kHz PWM and 800 kHz current-loop frequency for nanometer-class positioning.
-
Efficiency
Combines PWM architecture with integrated filtering to reduce heat and power loss compared to traditional linear amplifiers
-
Flexibility
Supports a wide range of motors (rotary, linear, voice coil) and encoder types for diverse motion applications
-
Fast Integration
EtherCAT connectivity and PMP software enable rapid commissioning and seamless system integration
-
Scalability
Ideal for single-axis or multi-axis setups in semiconductor, metrology, and advanced packaging environments
-
Advanced Diagnostics
High-speed Ethernet diagnostics for real-time tuning and measurements
Applications
-
Wafer inspection

-
Advanced Packaging

-
Atomic force microscope
-
Lithography

Related products
-
Servo drives - Cygnus

Servo drives - Cygnus
Multi-axis EtherCAT servo drive for any type of motor. -
Motion controller - Poseidon EGS

Motion controller - Poseidon EGS
Ultra-fast, multi-core motion controller for advanced precision systems -
Vacuum linear motors - Gryphon

Vacuum linear motors - Gryphon
-
Motion software - PMP
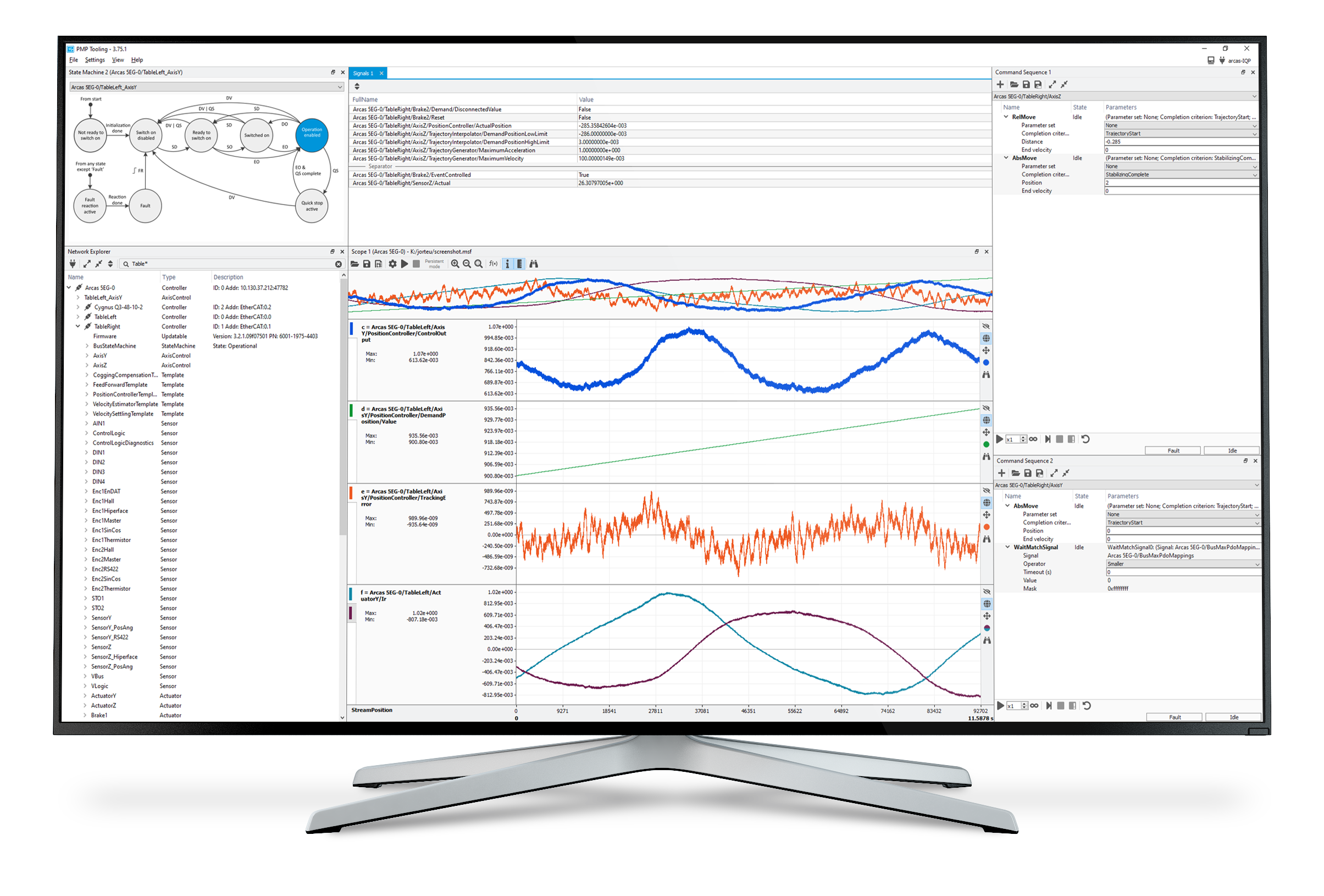
Motion software - PMP